長野匡隼,中村 友昭,”GP-HSMMに基づく二重分節化モデルによる連続音声の教師なし構造学習”,日本ロボット学会論文誌,Vol. 41, No. 3, pp. 318-321, Apr. 2023 [PDF]
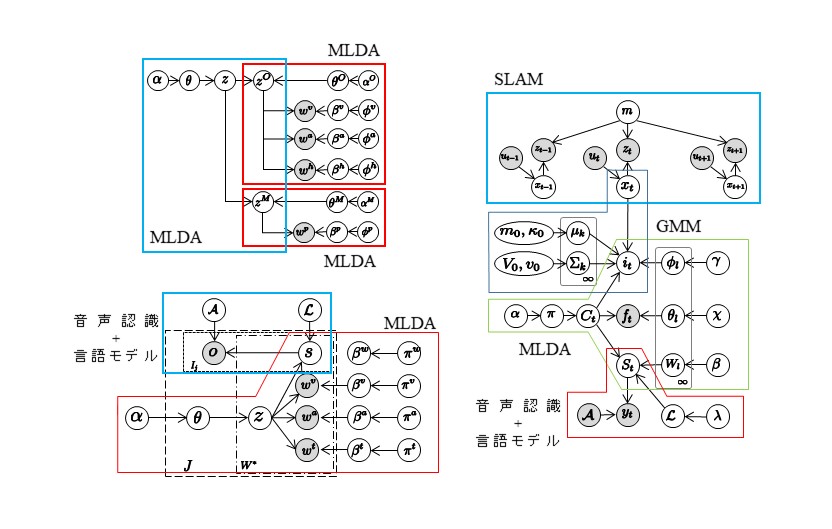
Ryo Kuniyasu, Tomoaki Nakamura, Tadahiro Taniguchi, Takayuki Nagai, “Robot Concept Acquisition Based on Interaction between Probabilistic and Deep Generative Models”, Frontiers in Computer Science, Vol. 3, Article 618069, pp. 1-14, Sep. 2021 [PDF]
Joe Nishihara, Tomoaki Nakamura, Takayuki Nagai, “Online Algorithm for Robots to Learn Object Concepts and Language Model”, IEEE Transactions on Cognitive and Developmental Systems, Vol. 9, No. 3, pp. 255-268, Apr. 2017 [PDF]
Keita Fukuoka, Masatoshi Nagano, Tomoaki Nakamura, Akira Taniguchi and Tadahiro Taniguchi, “Variational Bayes Naming Game: Decentralized Multi-agent Inference for Symbol Emergence”, Advanced Robotics, May 2026 [PDF]
Tadahiro Taniguchi, Ryo Ueda, Tomoaki Nakamura, Masahiro Suzuki and Akira Taniguchi, “Generative Emergent Communication: Large Language Model is a Collective World Model”, Advanced Robotics, May 2026 [PDF]
Ziwoo You, Issei Saito, Masatoshi Nagano, Tomoaki Nakamura, Akira Taniguchi and Tadahiro Taniguchi, “Continuous Symbol Emergence via Decentralized Bayesian Inference with Gaussian Processes”, IEEE Transactions on Cognitive and Developmental Systems, (accepted) [PDF]
Tomoaki Nakamura, Akira Taniguchi, Tadahiro Taniguchi, “Control as Probabilistic Inference as an Emergent Communication Mechanism in Multi-Agent Reinforcement Learning”, arXiv:2307.05004, 2023 [PDF]
Shuntaro Itakura, Masatoshi Nagano, Tomoaki Nakamura, “Semi-Autonomous Teleoperation for Mobile Manipulator via Action Chunking with Transformers”, Annual Conference of the IEEE Industrial Electronics Society, IECON25-000297, Oct. 2025 [PDF]
Tatsuya Aoki, Tomoaki Nakamura, Takayuki Nagai, “Analysis of User Behavior and Workload During Simultaneous Tele-operation of Multiple Mobile Manipulators”, IROS2022, Oct. 2022 [PDF]
Issei Saito, Masatoshi Nagano, Tomoaki Nakamura, Daichi Mochihashi, and Koki Mimura, “Scalable Unsupervised Segmentation via Random Fourier Feature-based Gaussian Process”, Annual Conference of the IEEE Industrial Electronics Society, IECON25-000290, Oct. 2025 [PDF]
Masatoshi Nagano, Tomoaki Nakamura, Takayuki Nagai, Daichi Mochihashi and Ichiro Kobayashi, “Spatio-Temporal Categorization for First-Person-View Videos Using a Convolutional Variational Autoencoder and Gaussian Processes”, Frontiers in Robotics and AI, Vol. 9, Sep. 2022 [PDF]
Masatoshi Nagano, Tomoaki Nakamura, Takayuki Nagai, Daichi Mochihashi, Ichiro Kobayashi and Wataru Takano, “HVGH: Unsupervised Segmentation for High-dimensional Time Series Using Deep Neural Compression and Statistical Generative Model”, Frontiers in Robotics and AI, Vol. 6, Article 115, pp. 1-15, Nov. 2019 [PDF]
Masatoshi Nagano, Tomoaki Nakamura, Takayuki Nagai, Daichi Mochihashi, Ichiro Kobayashi, Masahide Kaneko, “Sequence Pattern Extraction by Segmenting Time Series Data Using GP-HSMM with Hierarchical Dirichlet Process”, IROS2018, pp. 4067-4074, Oct. 2018 [PDF]
Ryo Kuniyasu, Tomoaki Nakamura, Tadahiro Taniguchi, Takayuki Nagai, “Robot Concept Acquisition Based on Interaction between Probabilistic and Deep Generative Models”, Frontiers in Computer Science, Vol. 3, Article 618069, pp. 1-14, Sep. 2021 [PDF]
Tomoaki Nakamura, Takayuki Nagai and Tadahiro Taniguchi, “SERKET: An Architecture for Connecting Stochastic Models to Realize a Large-Scale Cognitive Model”, Frontiers in Neurorobotics, vol. 12, article 25, pp. 1-16, Jun. 2018 [PDF]
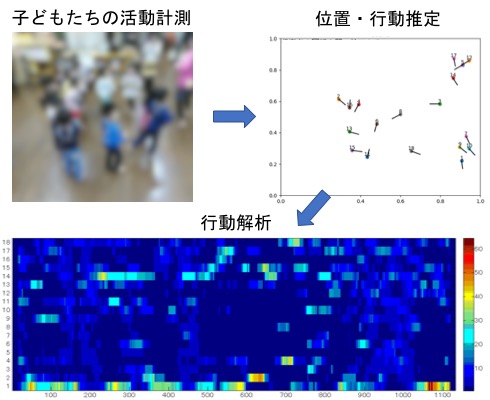
Ryo Matsumoto, Zhang Bin, Tomoaki Nakamura, Takayuki Nagai, Takashi Omori, and Natsuki Oka, “Robust Human Trajectory Estimation Using Hidden Markov Models”, RISP International Workshop on Nonlinear Circuits, Communications and Signal Processing, pp. 13-16, Feb. 2020
Yoshiki Higuchi, Kasumi Abe, Masatoshi Nagano, Rena Kanai, Masahiro Shiomi, Takayuki Nagai and Tomoaki Nakamura, “HSMM-SA-based Analysis of ChildcareWorker’s Interaction Strategy”, RISP International Workshop on Nonlinear Circuits, Communications and Signal Processing, pp. 1-4, Feb. 2020
Bin Zhang, Tomoaki Nakamura, Rena Ushiogi, Takayuki Nagai, Kasumi Abe, Takashi Omori, Natsuki Oka, and Masahide Kaneko, “Robust Children Behavior Tracking for Childcare Assisting Robot By Using Multiple Kinect Sensors”, International Conference on Social Robotics, pp.640-649, Nov. 2016 [PDF]